





(1)点云数据解算
用机载激光雷达系统原始观测数据解算出LAS标准格式的点云数据。激光雷达激光扫描数据一般以局部极坐标或三维坐标的形式输出和存储,激光头通过接入惯导脉冲信号获取GPS时间基准,可与激光扫描信息同步输出和存储时间标记,利用外业获取的原始激光扫描数据、IMU数据和GPS数据,对激光雷达设备的数据传输标准与数据编码进行解析,得到含有GPS时间标记的激光雷达扫描数据;借助惯导设备自带的后处理软件进行航线姿态解算,得到包含GPS时间标记、位置数据(DGPS)和姿态数据(IMU)的航迹数据;激光扫描数据和航迹数据通过GPS时间标记进行配准,通过投影变换和空间位置解算,得到空间点位置信息,将所有空间点位置信息通过转换存储输出为标准格式LAS文件。
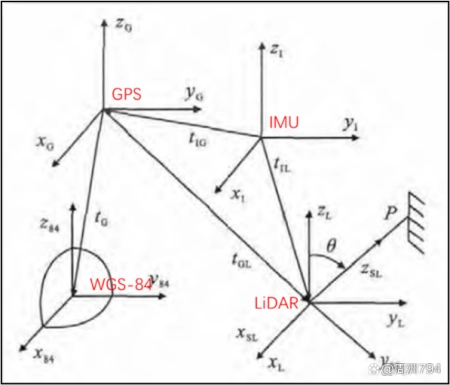
图机载激光雷达数据预处理技术所涉及坐标系
(2)点云金字塔构建
考虑到点云的数据量特性和计算机资源有限性,采用静态LOD实现多分辨率金字塔模型的构建。构建金字塔模型的过程也是通过空间索引分解海量点云数据的过程,在这个过程中最终的结果就是产生一个按某种规则分配的点云瓦片的集合。点云瓦片化就是实现构建海量点云数据LOD模型的过程。以简单高效的格网索引为基础,以基本格网为分界面,向上将基本格网内的激光点高程内插为格网高程,并通过四叉树编码方法形成多分辨率的金字塔模型。
(3)点云空间索引
激光点云数据量大,点云检索需要较长时间,在很大程度上影响数据处理效率。利用KD树搜索与某一点距离最近的K个点的过程称为KD树搜索,其方法是通过计算所有点与某一中心点的欧氏距离,比较出最近的K个点。通常邻近点的搜索从树的底层开始,即空间的小区域开始,逐渐向树的上层的空间区域搜索,因而可以较好地提高空间搜索最近点的效率。
(4)多源数据配准与融合
将地表图像特征点的二维像方坐标转换为物方坐标。对于地表图像某一特征点,假定该点的空间坐标Z为点云的平均高程,利用正算公式(xr-2),获得概略物方平面坐标,再由采用内插得到高程,利用和再由正算公式求得,直到前后两次得到的之差小于一定阈值,以最后两次得到的的坐标均值作为该特征点的物方坐标。
(5)树木生长模型参数估计方法
假设研究中模型的表现形式为:
式中:Y是模型中的因变量,z是模型中的自变量,是模型中待估参数。
在传统统计框架下,可通过最大似然法或最小二乘法获取,是一个固定的值。在贝叶斯统计框架下,是个概率分布,是根据参数的先验分布和因变量Y的似然函数获取。贝叶斯统计方法如下分析:
假设为样本向量,为参数向量,那么贝叶斯公式可概括为:

式中:样本和参数都为随机变量,其中p表示概率分布或密度方程,()为参数的先验分布,p(y)是y的边缘密度函数。
